So these spaces are really interesting, but super duper hard to get your head around. So in this blog, I hope to make there equivalent definitions a little bit easier to understand.
I’m going to present 3 equivalent definitions of the n-dimensional real projective space using the language of quotient spaces, and then prove that they are indeed equivalent.
A.  is
is  by identifying the antipodal points. (Sphere Model)
by identifying the antipodal points. (Sphere Model)
B. is  by identifying two points if they lie on the same line through the origin. (Line Model)
by identifying two points if they lie on the same line through the origin. (Line Model)
C. is the unit ball  and identifying antipodal points on its surface. (Ball Model)
and identifying antipodal points on its surface. (Ball Model)
Now all three models are quotient spaces, and to prove that they are equivalent, i.e. that they are homeomorphic, we will need a bit of theory about identification maps. So let’s take a few moments to say a couple of things.
Say, we have topological spaces  and
and  , and a continuous surjective map
, and a continuous surjective map  , then we call
, then we call  an identification map. Why? Because, provides a natural partition of the space into subsets
an identification map. Why? Because, provides a natural partition of the space into subsets  where
where  . That might boggle your mind, so let’s take a look at an example.
. That might boggle your mind, so let’s take a look at an example.
Consider the spaces  and
and  . We can define the continuous surjective function
. We can define the continuous surjective function
![\[f(\vec{x})=\frac{\vec{x}}{\norm{x}}.\]](http://www.anthonysalib.com/wp-content/ql-cache/quicklatex.com-941e5d72d611f94abffcef333661f441_l3.png "Rendered by QuickLaTeX.com")
Now, clearly, any vector that points in the same direction in  will get mapped to the same point
will get mapped to the same point  on . These sets of pre-images of the point
on . These sets of pre-images of the point  provide the partition of , known as the sets of the pre-images of f, . We can see now, that we can describe as the disjoint union of the pre-images of , i.e.
provide the partition of , known as the sets of the pre-images of f, . We can see now, that we can describe as the disjoint union of the pre-images of , i.e.
![\[\mathbb{R}^3 =\sqcup_{y\in S^2} \{f^{-1}(y)\}.\]](http://www.anthonysalib.com/wp-content/ql-cache/quicklatex.com-497dc776de00f087e651f540d6fc3c33_l3.png "Rendered by QuickLaTeX.com")
Since is surjective, none of these sets will be the empty set and so it is well defined. Now, we can represent this quotient space as  , which reads as partitioned into pre-images of .” Now, in the example I chose, it is obviously true that is homeomorphic to .
, which reads as partitioned into pre-images of .” Now, in the example I chose, it is obviously true that is homeomorphic to .
Now let’s go back to the general case, topological spaces and and the map . Now if is an identification map, it immediately follows that  is homeomorphic to , i.e. that
is homeomorphic to , i.e. that  in the picture below is a homeomorphism. Also note, that the
in the picture below is a homeomorphism. Also note, that the  is just the canonical projection form to it’s quotient space.
is just the canonical projection form to it’s quotient space.

Now, there are two results that we can use to check if our given map is an identification map, and then simply state that  and
and  are homeomorphic, let’s state them so we can use them. The first result relates to the map and the second one relates to the spaces.
are homeomorphic, let’s state them so we can use them. The first result relates to the map and the second one relates to the spaces.
Theorem 1: If a surjective and continuous map  maps open sets to open sets, or closed sets to closed sets, then is an identification map.
maps open sets to open sets, or closed sets to closed sets, then is an identification map.
Theorem 2: Let be a surjective and continuous map from to . If is compact and is Hausdorff, then is an identification map.
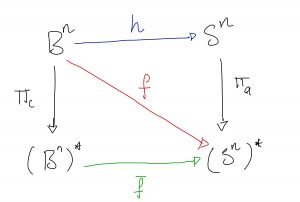
Now we have the necessary gadgets to prove that the three definitions of the real projective space are indeed homeomorphic. Let’s start by showing that the sphere model is homeomorphic to the line model, and it is always a good idea to draw out a little diagram of our spaces and what maps what to what.
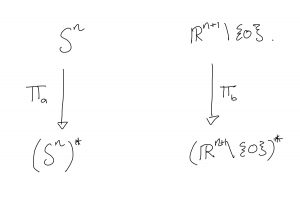
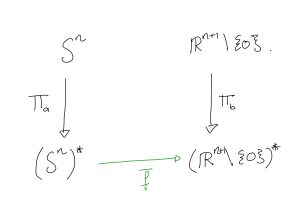
Now, we want to show that the bottom two spaces, are homeomorphic, so following the general model that we introduced above, we want to be between them.
So this must mean we need to find an identification map between the diagonal spaces, shown in red below.
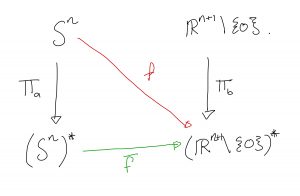
Now, we can try really hard to be smart and think of a single map straight to  , or we can just compose some simple functions. Namely, we can see that we can go from to
, or we can just compose some simple functions. Namely, we can see that we can go from to  using the inclusion map.
using the inclusion map.
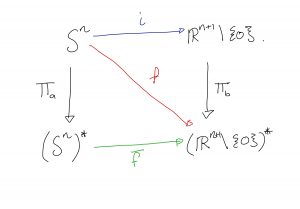
Now since  and
and  are both continuous and surjective, it follows that
are both continuous and surjective, it follows that  is also continuous and surjective. is a closed subset of
is also continuous and surjective. is a closed subset of  and is therefore compact. We now just need to show that is indeed Hausdorff and we would be done by Theorem 2.
and is therefore compact. We now just need to show that is indeed Hausdorff and we would be done by Theorem 2.
So now, let’s prove that this space is Hausdorff. This is no small feat. The idea behind this will be to use the fact that we can find disjoint open sets in  because it is Hausdorff, and then use our quotient map to take these disjoint open sets to disjoint open sets in the quotient space.
because it is Hausdorff, and then use our quotient map to take these disjoint open sets to disjoint open sets in the quotient space.
So we start by taking two elements  and in our quotient space, which are just lines through the origin in . We can look at the intersection of these lines with , which would be 4 distinct points,
and in our quotient space, which are just lines through the origin in . We can look at the intersection of these lines with , which would be 4 distinct points,  are the intersections of with , and
are the intersections of with , and  are the intersections with . Since is a subset of the Hausdorff space , we can find disjoint open sets that contain each of and , call them
are the intersections with . Since is a subset of the Hausdorff space , we can find disjoint open sets that contain each of and , call them  and
and  . Furthermore, we can construct each of these sets so that if
. Furthermore, we can construct each of these sets so that if  then
then  , which ensures that
, which ensures that  , and the same for . Now, for any
, and the same for . Now, for any  , it follows that
, it follows that  , hence,
, hence,  , which ensures that
, which ensures that  . Now, don’t let this trip you out, we only need to have a little bit of the line in
. Now, don’t let this trip you out, we only need to have a little bit of the line in  , so that in the quotient space,
, so that in the quotient space,  contains the equivalence class , and same for and
contains the equivalence class , and same for and  . So, in the quotient space,
. So, in the quotient space,  and is open, and
and is open, and  and is open. Hence, is Hausdorff!
and is open. Hence, is Hausdorff!
Now, we want to show that Ball Model in C, is equivalent to the sphere model in A. Here is the map of our spaces and functions.
Where  takes the point
takes the point  to
to  . Clearly,
. Clearly,  is continuous and surjective, and so the
is continuous and surjective, and so the  is continuous and surjective. Now, clearly is compact, and
is continuous and surjective. Now, clearly is compact, and  is Hausdorff, the proof of which is virtually the same as that above just ignore the lines through the origin business and go straight to antipodal points. It follows that is an identification map and so
is Hausdorff, the proof of which is virtually the same as that above just ignore the lines through the origin business and go straight to antipodal points. It follows that is an identification map and so  is homeomorphic to .
is homeomorphic to .
Brace yourself,
You’re probably thinking, what the heck is the point of all this, like why on earth are we even doing this? Other than for the pure joy of it, which is of course enough of a reason to do it, there is a really nice connection between the projective plane,  , and non-orientable surfaces. We will build up to understanding this and then we will come back to our beloved projective plane .
, and non-orientable surfaces. We will build up to understanding this and then we will come back to our beloved projective plane .
So, what the hell is a surface? You probably have an idea what a surface is, you might think it’s a shape in 2 or 3 dimensions that has some faces, edges and vertices. Well, this is what comes to my mind when I think of a “surface”. But, what isn’t so natural to think of is how we work mathematically with surfaces, however, you’re in luck, because it is quite intuitive. We know that a surface is made up of vertices, edges and faces. So we would like to define these building blocks as simplicies. So, consider a rectangle, it has 4 vertices as shown, 4 edges and 1 face which are called the 0-simplex, 1-simplex and 2-simplex respectively.

Now, here I’ll stop and introduce something pretty neat, called the Euler characteristic of surface which is
![\[\chi= #\text{(0-simplicies)}-#\text{(1-simplicies)}+#\text{(2-simplicies)}.\]](http://www.anthonysalib.com/wp-content/ql-cache/quicklatex.com-75991a8473ba23bdbc1673d4d29826ee_l3.png "Rendered by QuickLaTeX.com")
In terms of our everyday language, this is just vertices – edges + faces. Take note of this, it’s gonna come back big time.
Finally, we note that we can give a surface an orientation, which is an ordering of the vertices. If the faces of the surfaces can be orientated such that a loop on the face going clockwise cannot be continuously deformed to a loop going anti-clockwise without overlapping itself, we say that the surface is orientable. As an example, consider the Mobius strip, it is non-orientable as a loop on the boundary goes clockwise and then anti-clockwise. In fact, if a surface contains a subset homeomorphic to the mobs strip, it is not orientable.
Here we go,
Now, it turns out, that any connected non-orientable surface, is homeomorphic to the connected sum of n-projective planes . WHAAAAAT! Completely unexpected, right!?
But how do we know how many projective planes we need? Well, we look at the Euler characteristic of course!
Th Euler characteristic of the connected sum of n projective planes is
![\[\chi=2-n.\]](http://www.anthonysalib.com/wp-content/ql-cache/quicklatex.com-45a7b59baf1bb671ac8ce9fe46c62202_l3.png "Rendered by QuickLaTeX.com")
Now all you need to do is figure out, how many projective planes you need to get the same Euler characteristic of your surface, and bam, you done.
As a side note, if the surface is orientable, it is the connected sum of n-tori or it is the sphere if  , where
, where  for the connected sum of n-tori.
for the connected sum of n-tori.
Now, why is this so useful? Because once you know what you’re homeomorphic to, you can easily compute the fundamental group of connected sums of the projective plane.
So there you go, any surface, is exactly the same as either a sphere, the connect sum of n-tori or the connected sum of n-projective planes. What a time to be alive.
Awesome post!